An open-source platform called π RuView uses the radio signals already present in any WiFi environment to detect people, track breathing, identify falls, and estimate body pose—entirely on local edge hardware, with no camera, no microphone, and no cloud dependency.
What Channel State Information Makes Possible at the Edge
WiFi Channel State Information (CSI) encodes how radio waves distort as they travel through a space. Human bodies, breath movements, and physical gestures all alter that distortion in measurable ways. RuView extracts those patterns in real time using ESP32-S3 mesh nodes—each available for roughly $9—paired with either a Cognitum Seed device (a Pi Zero 2 W-based platform priced at $257) or a Cognitum v0 Appliance for local processing.
The source package for RuView, published on GitHub, documents five primary sensing functions: presence detection through building materials, contactless vital sign monitoring, activity and fall detection, multi-person counting, and 3D body pose estimation. Each operates entirely on the local mesh; no data leaves the device by default.
Presence detection is reported at 100% validation accuracy through drywall, wood, and fabric, with sub-millisecond response latency. The system can also detect survivors through up to 30 cm of concrete, a specification the documentation flags as relevant for search-and-rescue applications. Vital sign monitoring targets breathing rates between 6 and 30 BPM and heart rates between 40 and 120 BPM, with a reported acquisition time of approximately one second.
The following metric card chart summarizes the source-documented sensing benchmarks across RuView's five core functions.
Hardware Architecture and the Minimum Viable Mesh
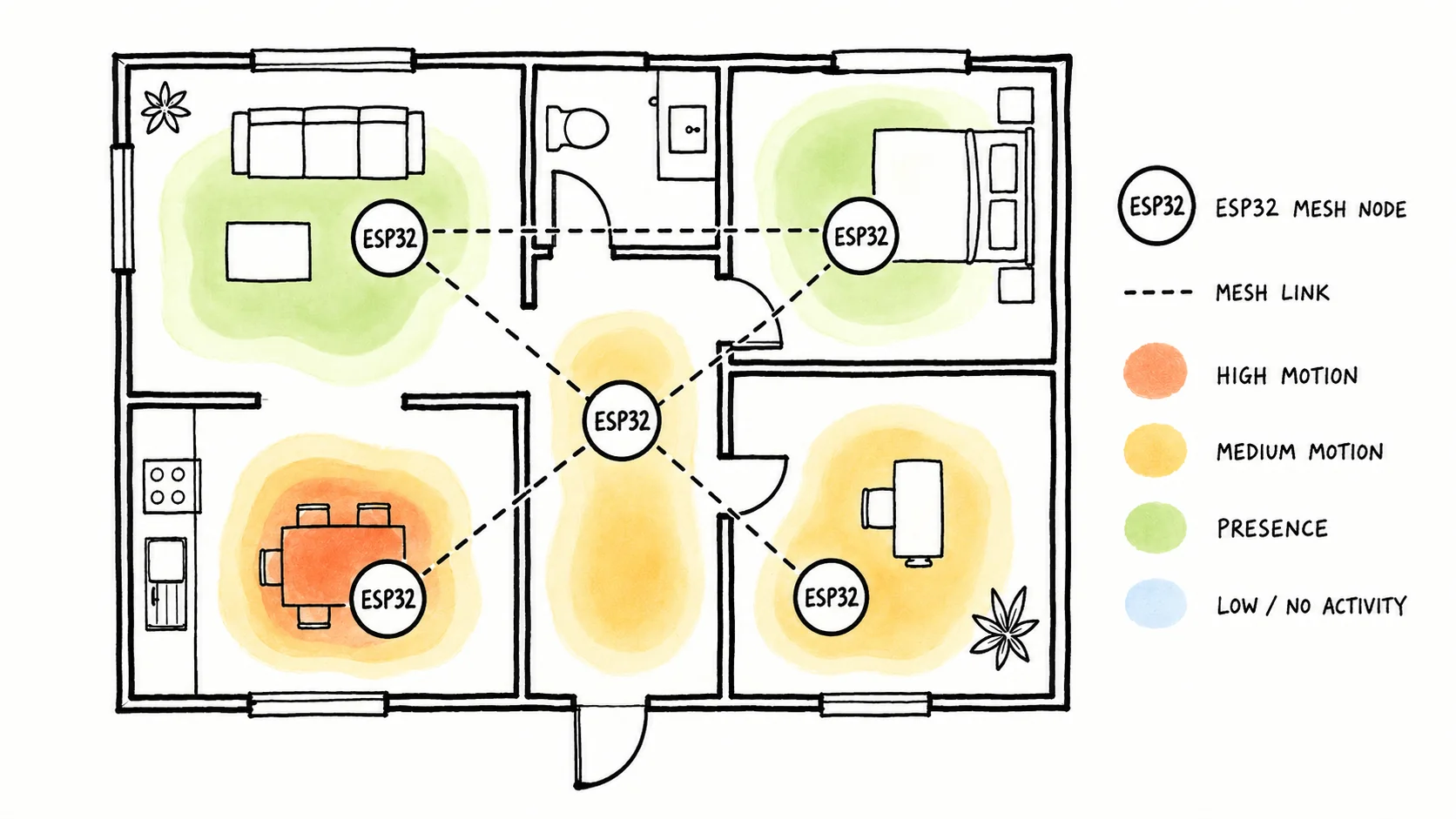
A single ESP32-S3 node running RuView handles presence detection only. Full 3D triangulation and room mapping require a mesh of at least three nodes—a hard constraint tied to geometry, not a performance preference. Multi-node setups scan across six WiFi channels simultaneously, using neighboring routers as passive radar illuminators rather than controlled emitters.
Processing runs on either a Cognitum Seed device or a Cognitum v0 Appliance. The Seed is based on a Pi Zero 2 W and is documented in the pretraining tutorial at $257. At-scale deployments with more nodes route through the Appliance, though pricing for that unit is not listed in the public documentation.
Room adaptation uses spiking neural networks paired with LoRA rank-4 per-room adapters, completing calibration in under 30 seconds. There is a meaningful operational caveat here: the first 60 seconds of system bootup serve as an ambient baseline calibration window. If a person is present in the room during that window, the system will register their presence as the ambient baseline and undercount occupancy until it re-calibrates. Deployments in always-occupied spaces—a nursing home room, a retail floor—need to account for this.
The body pose estimation model, published on Hugging Face as ruvnet/wifi-densepose-pretrained, weighs 8 KB using 4-bit quantization and achieves a reported 92.9% PCK@20 accuracy for 17-point COCO keypoints from radio waves when properly calibrated. That figure is conditioned on proxy-label fine-tuning; accuracy falls off meaningfully without it, and the documentation does not report an un-fine-tuned baseline.
The chart below maps the hardware cost structure of a minimal single-room RuView deployment against a full three-node mesh configuration.
Privacy Architecture and the Cryptographic Audit Chain
RuView's privacy model rests on what its documentation describes as "privacy by physics": the system captures no images, no audio, and no biometric templates in any conventional sense. Processing is local by default and the platform is designed to operate fully air-gapped, with no cloud dependency for any core function.
Beyond data residency, the platform documentation describes a tamper-proof, append-only audit log in which every measurement and memory mutation is cryptographically attested using an Ed25519 witness chain. This means the system not only avoids capturing visual data but also produces a verifiable record of every inference it makes—a design tradeoff that favors auditability over minimal storage footprint.
The MCP integration is notable for a technical audience: RuView exposes itself natively as a Model Context Protocol tool, meaning AI agents such as Claude or Cursor can query it directly for physical environment state without any intermediary API layer. Whether that integration pathway introduces new attack surface in specific deployments is not addressed in the current documentation.
Strong RF interference—fans near antennas, microwave ovens, or neighboring router instability—is documented as a source of occasional false positives. The documentation does not quantify the false-positive rate under interference conditions.
The diagram below traces the data flow from raw RF capture through CSI extraction, local inference, and the attested log.
The health monitoring capabilities—breathing rate and heart rate tracking—are documented as intended for screening and awareness purposes rather than clinical diagnosis. That distinction matters for any deployment targeting medical-adjacent use cases such as sleep apnea screening or fall monitoring in care settings, where regulatory classification may apply depending on jurisdiction.
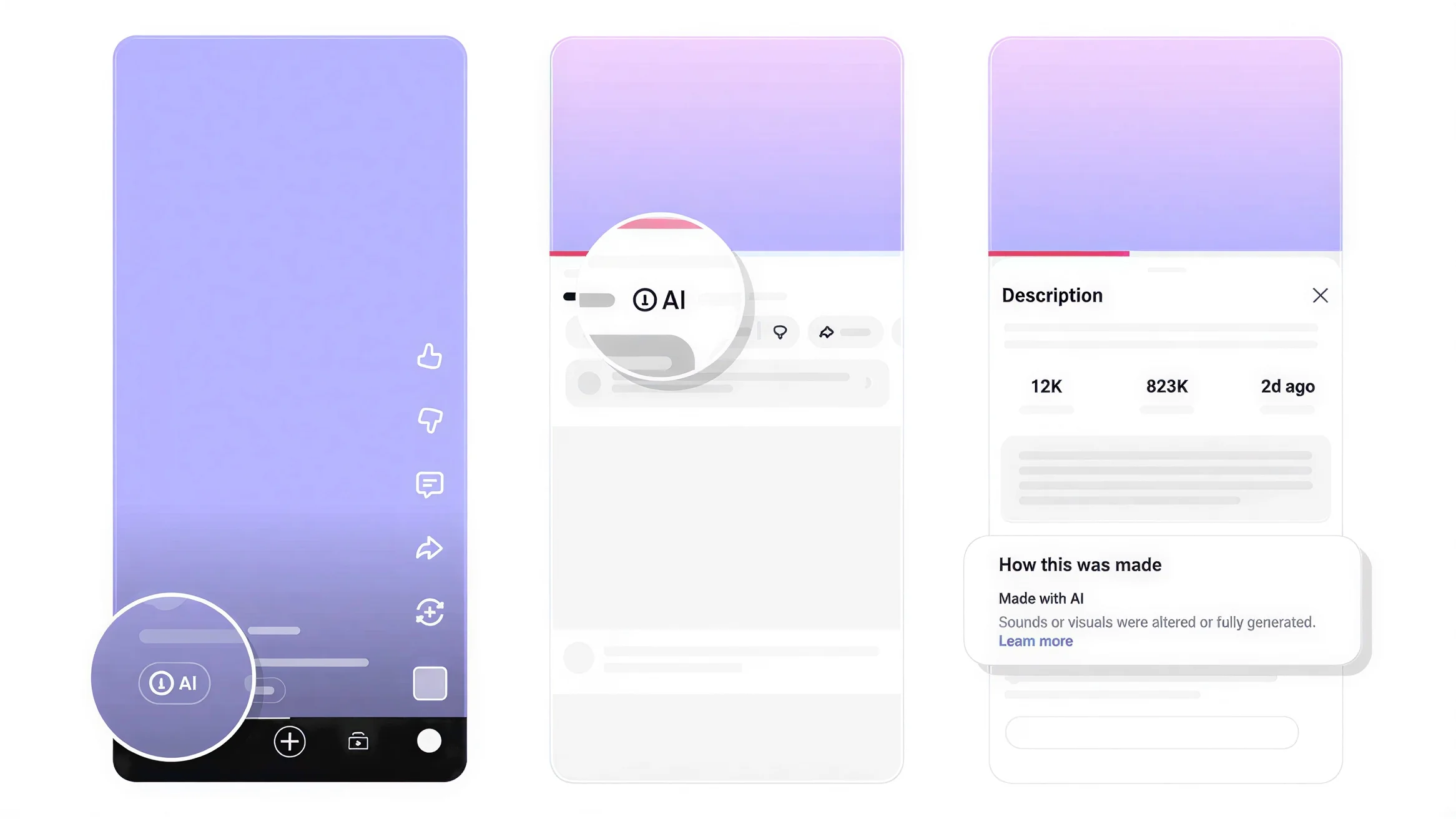
YouTube Updates AI Labels: More Visible, Auto-Applied
YouTube announced two AI disclosure updates on May 27 2026: more prominent label placement on long-form videos and Shorts, and automatic labeling when its systems detect significant photorealistic AI use without a manual disclosure.
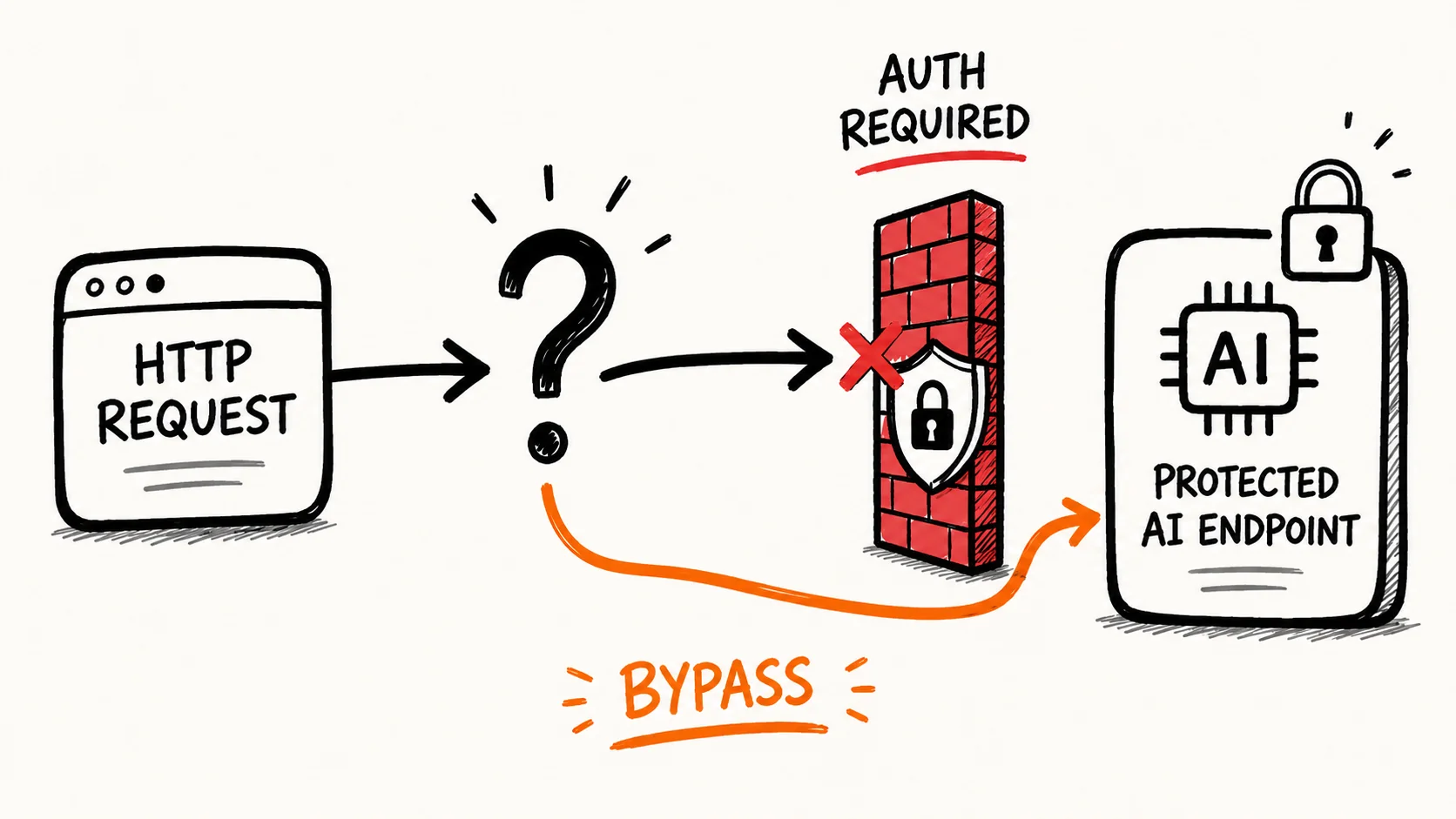
BadHost Flaw Exposes AI Infrastructure to Auth Bypass
CVE-2026-48710 "BadHost" exploits Starlette's Host header reconstruction flaw to bypass authentication middleware in FastAPI, LiteLLM, vLLM, and most Python AI infrastructure. Patch to 1.0.1 immediately.

Drew Houston Steps Down as Dropbox CEO After 19 Years
Dropbox co-founder Drew Houston is stepping down as CEO after 19 years, naming Ashraf Alkarmi co-CEO and eventual sole successor as revenue growth stalls near zero and rivals deepen AI integrations into cloud storage.
macOS Tahoe 26.5 Security Patches: Key Vulnerabilities Fixed
macOS Tahoe 26.5 patches kernel privilege escalation, memory corruption, a Gatekeeper disk-image bypass, and multiple WebKit content-processing flaws released May 11, 2026.
Comments (0)
Please sign in to join the discussion.
No comments yet.
Be the first to share your perspective on this topic.